WebRTC之NACK、RTX 在什么时机判断丢包发送NACK请求和RTX丢包重传
@TOC
</font>
<hr style=” border:solid; width:100px; height:1px;” color=#000000 size=1”>
WebRTC专题开嗨鸭 !!!一、 WebRTC 线程模型
2、WebRTC网络PhysicalSocketServer之WSAEventselect模型使用
二、 WebRTC媒体协商
1、WebRTC媒体协商之SDP中JsepSessionDescription类结构分析
三、 WebRTC 音频数据采集
四、 WebRTC 音频引擎(编解码和3A算法)
五、 WebRTC 视频数据采集
六、 WebRTC 视频引擎( 编解码)
七、 WebRTC 网络传输
2、WebRTC的ICE之Dtls/SSL/TLSv1.x协议详解
八、 WebRTC服务质量(Qos)
3、WebRTC之NACK、RTX 在什么时机判断丢包发送NACK请求和RTX丢包重传
九、 NetEQ
十、 Simulcast与SVC
前言
NACK 是判断网络是否丢包重传, 和网络情况
一、NACK与RTX的作用
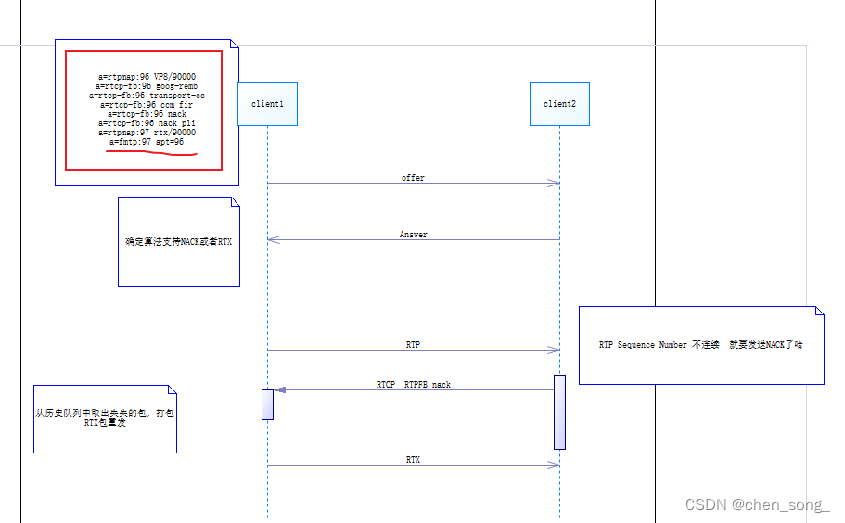
1、NACK用于通知丢失了哪些包 2、RTX用于重传丢失的包在发送offer和answer中是否正常Nack和RTX的协议
···
a=rtpmap:96 VP8/90000
a=rtcp-fb:96 goog-remb
a=rtcp-fb:96 transport-cc
a=rtcp-fb:96 ccm fir
a=rtcp-fb:96 nack
a=rtcp-fb:96 nack pli
a=rtpmap:97 rtx/90000
a=fmtp:97 apt=96
···
1、NACK/RTX的工作机制的流程图
2、NACK/RTX涉及到的几个问题
1、如何判定算法发送了丢包 Sequence Number 不连续的时候是丢包了哈 2、NACK什么时候发送 3、NACK的格式是怎样的,当发送端收到NACK时如何处理? 4、RTX格式是怎样的,RTX与NACK如何配合的?
二、判断包位置的关键算法
1、一个关键的函数:AheadOf
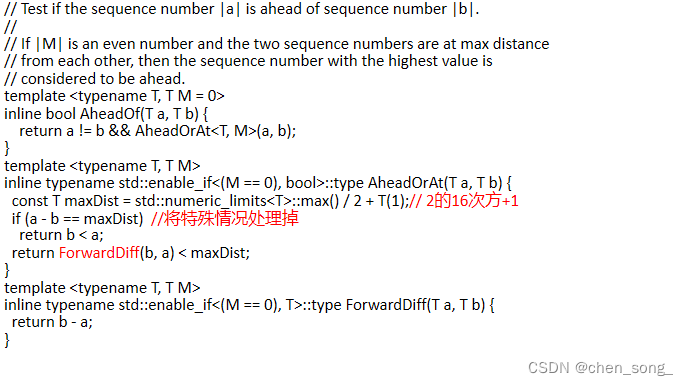
1、 AheadOf(a,b), 比较a与b的顺序关系 2、a与b必须是无符号整数 3、如果吧排在a前面,则返回真,否则返回false 4、需要注意的是,他们不是简单的数值大小的比较
三、WebRTC中NACK的处理流程图
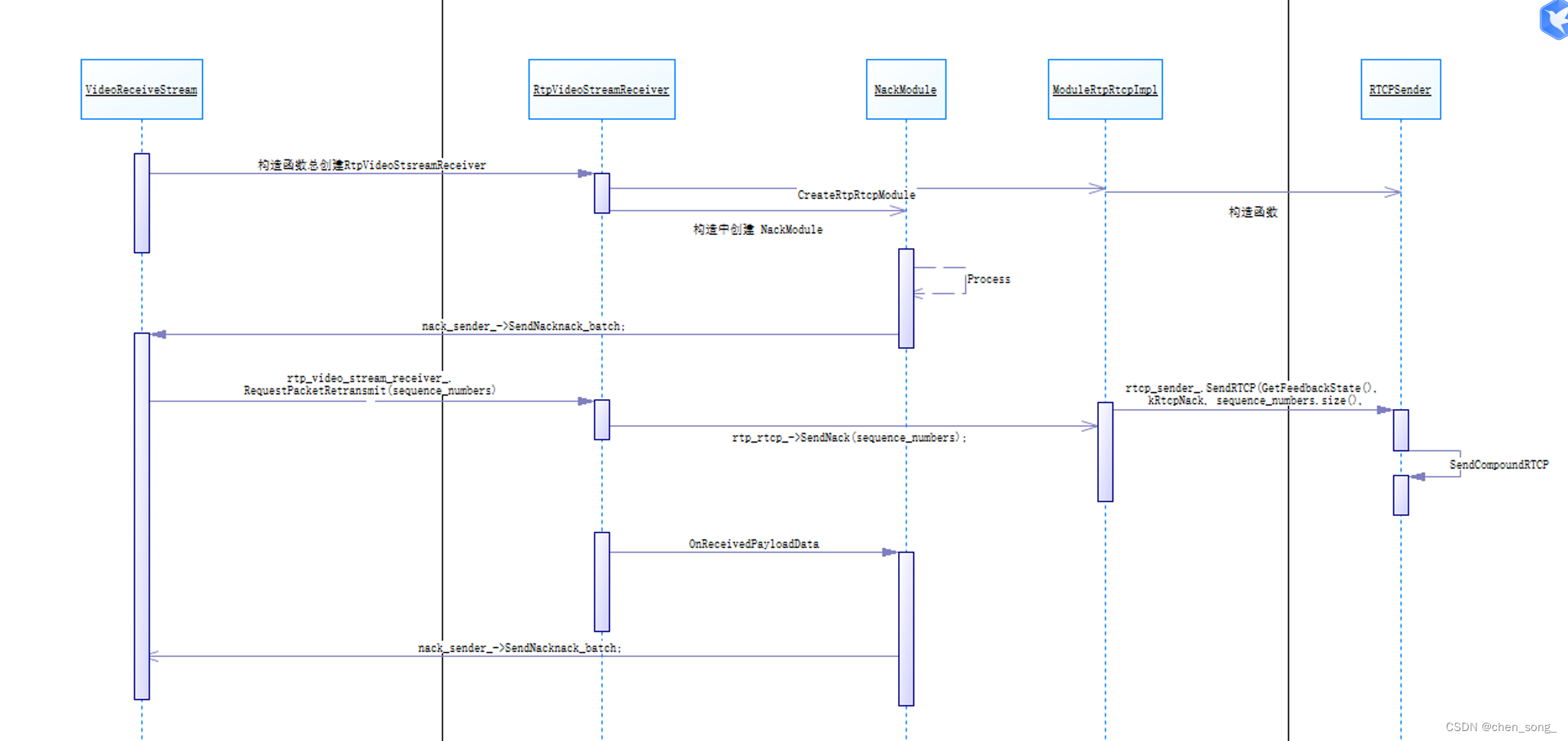
1、NackMoudle的创建时机
在RtpVideoStreamReceiver中构造函数中创建NackMoudle类哈
RtpVideoStreamReceiver是在VideoReceiveStream类的构造函数创建哈
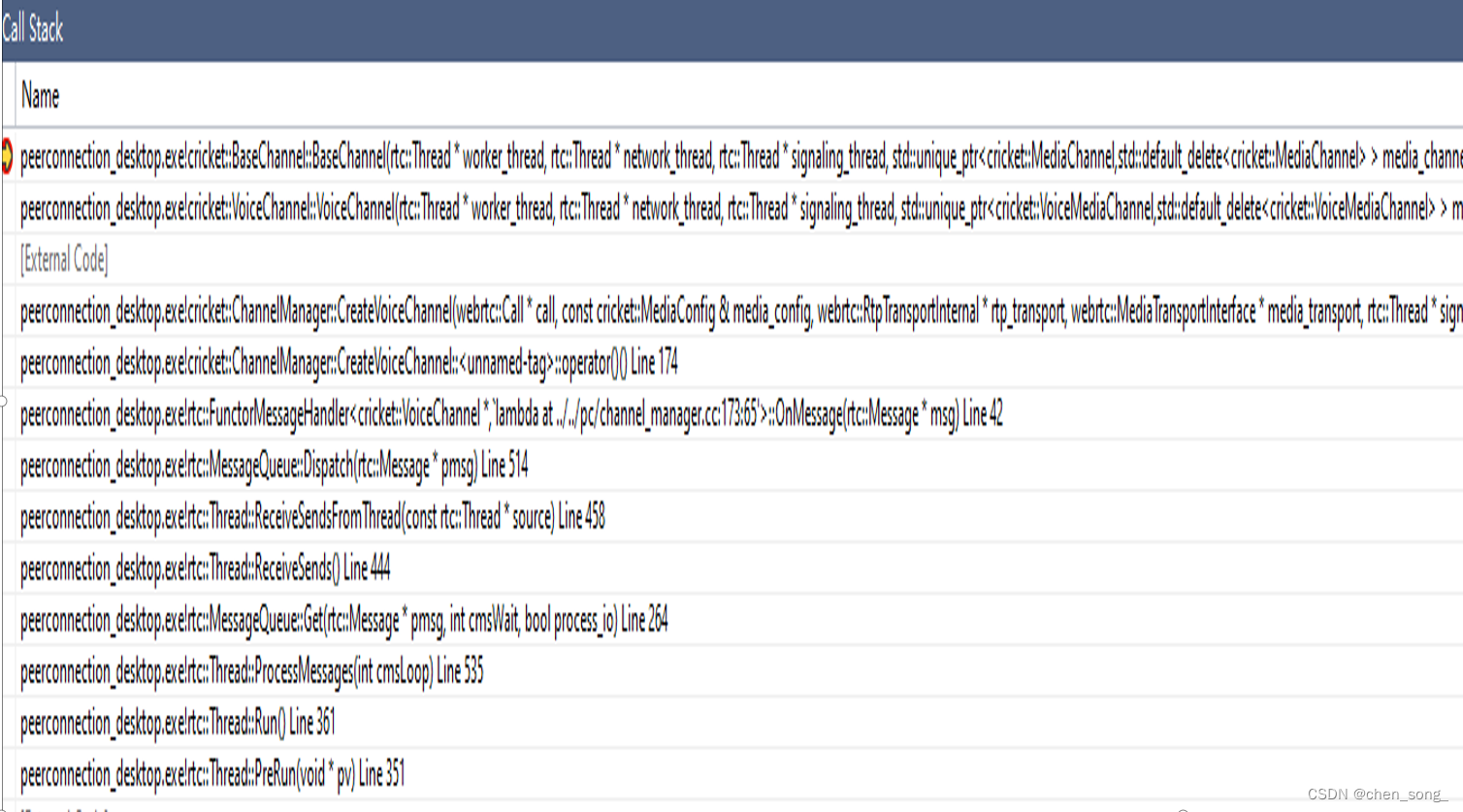
1、NACK调用栈
四、WebRTC如何判断是否丢包的逻辑
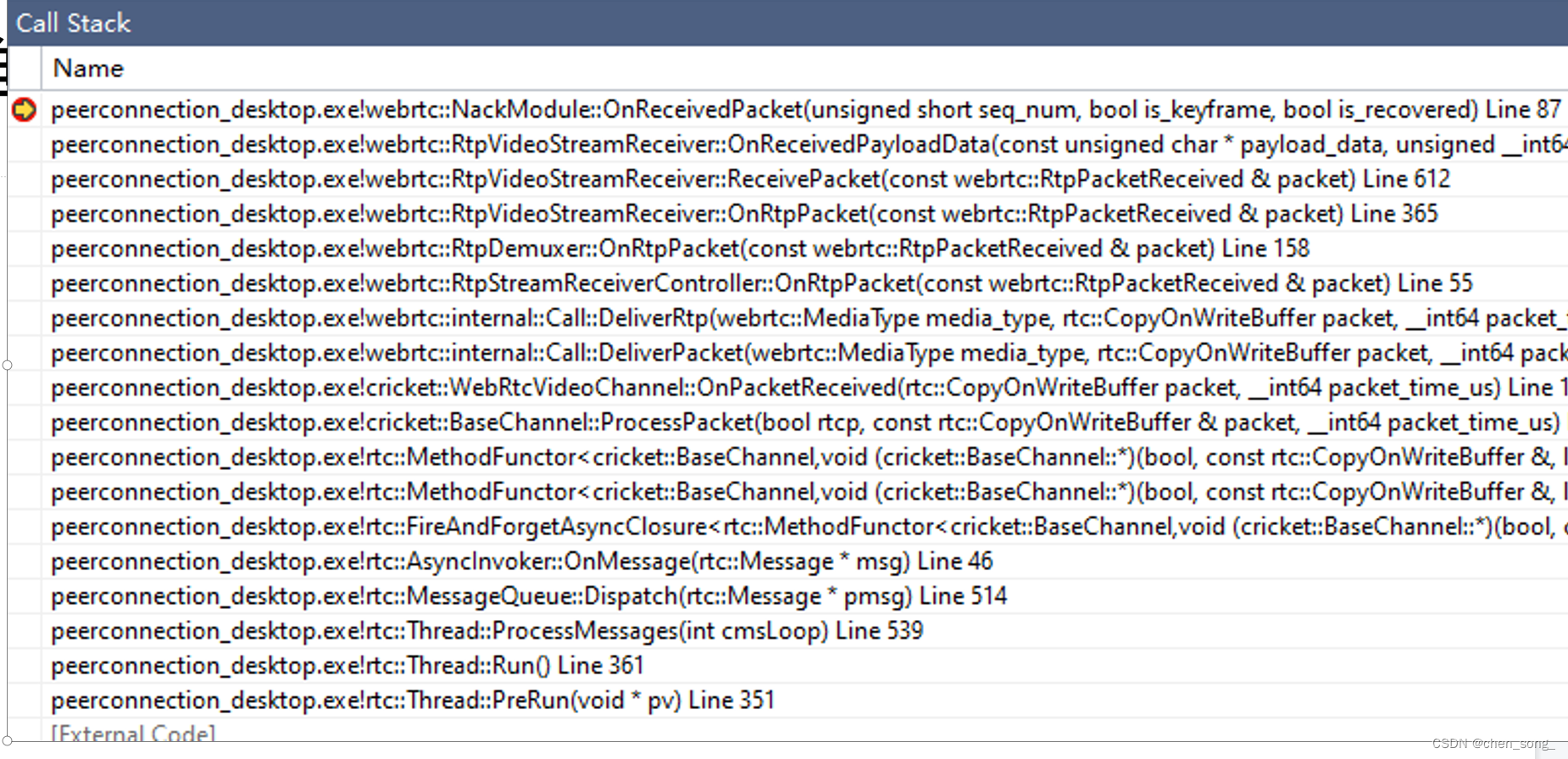
1、NackModule::OnReceivedPacket 函数
moudle/video_codeing/nack_module.h
int NackModule::OnReceivedPacket(uint16_t seq_num,
bool is_keyframe,
bool is_recovered) {
rtc::CritScope lock(&crit_);
// TODO(philipel): When the packet includes information whether it is
// retransmitted or not, use that value instead. For
// now set it to true, which will cause the reordering
// statistics to never be updated.
bool is_retransmitted = true;
// 1. 判断是否第一次, 初始化 完成就退出
if (!initialized_) {
newest_seq_num_ = seq_num;
if (is_keyframe)// 这个包是否关键帧===》》 为什么要识别关键帧???
keyframe_list_.insert(seq_num);
initialized_ = true;
return 0;
}
// Since the |newest_seq_num_| is a packet we have actually received we know
// that packet has never been Nacked.
// 2. 如果这次来的seq与上次一样,是重复包, 退出
if (seq_num == newest_seq_num_)
return 0;
// 即不是第一个包和重复包就判断包顺序哈 seq_num在newest_seq_num之前就要删除了哈
// 3. 如果是上次处理前面的包, 这个包已经失效了, 如果还在nack列表中, 需要删除的
// 说明这个包晚到达了
if (AheadOf(newest_seq_num_, seq_num)) {
// An out of order packet has been received.
auto nack_list_it = nack_list_.find(seq_num);
int nacks_sent_for_packet = 0;
if (nack_list_it != nack_list_.end()) {
nacks_sent_for_packet = nack_list_it->second.retries;
nack_list_.erase(nack_list_it);
}
if (!is_retransmitted)
UpdateReorderingStatistics(seq_num);
return nacks_sent_for_packet;
}
// Keep track of new keyframes.
// 4. 如果判断是否是key帧??? 哈
if (is_keyframe)
keyframe_list_.insert(seq_num); // 如果该报属于key帧, 保持起来
// And remove old ones so we don't accumulate keyframes.
// 5. 找到最小边界点, 超出10000个就要删除之前的数据 , 这个是实时系统
auto it = keyframe_list_.lower_bound(seq_num - kMaxPacketAge);
if (it != keyframe_list_.begin())
keyframe_list_.erase(keyframe_list_.begin(), it);
// 6. 如何判断是否找回来的包??? 恢复包
if (is_recovered) {
recovered_list_.insert(seq_num); // 如果该包是属于key帧,保持起来
// Remove old ones so we don't accumulate recovered packets.
// 是否超出项 超出项也删除了 , 最大项也是10000哈
auto it = recovered_list_.lower_bound(seq_num - kMaxPacketAge);
if (it != recovered_list_.begin())
recovered_list_.erase(recovered_list_.begin(), it);
// Do not send nack for packets recovered by FEC or RTX.
return 0;
}
// 7. 什么情况会走到这边呢
// 1、不是第一个包
// 2. 不是一个重复的包
// 3、 不是在new_seq_num之前的包
// 4、 不是一个恢复包
// 有两种情况会走到这边
// 1、 上一次处理的包的后面的一个包哈 有序的包
// 2、 上一次处理的包 后面隔好几个包
AddPacketsToNack(newest_seq_num_ + 1, seq_num);
newest_seq_num_ = seq_num;
// Are there any nacks that are waiting for this seq_num.
// 8. 哪些包是真真丢包的 就告诉对方从新发送包哈
std::vector<uint16_t> nack_batch = GetNackBatch(kSeqNumOnly);
if (!nack_batch.empty())
nack_sender_->SendNack(nack_batch); // 需要重传哈 放到缓冲区了 ??????
return 0;
}
2、 NackModule::AddPacketsToNack初步判断有哪些包丢包了
void NackModule::AddPacketsToNack(uint16_t seq_num_start,
uint16_t seq_num_end) {
// Remove old packets.
auto it = nack_list_.lower_bound(seq_num_end - kMaxPacketAge);
nack_list_.erase(nack_list_.begin(), it);
// If the nack list is too large, remove packets from the nack list until
// the latest first packet of a keyframe. If the list is still too large,
// clear it and request a keyframe.
// 1. 开始到结束之间有多大距离
uint16_t num_new_nacks = ForwardDiff(seq_num_start, seq_num_end);
if (nack_list_.size() + num_new_nacks > kMaxNackPackets) {
while (RemovePacketsUntilKeyFrame() &&
nack_list_.size() + num_new_nacks > kMaxNackPackets) {
}
// 1.1、 极端情况 没有删除, 就要清除nack, 然后发送请求关键帧给对方 让解码器从新工作哈
if (nack_list_.size() + num_new_nacks > kMaxNackPackets) {
nack_list_.clear();
RTC_LOG(LS_WARNING) << "NACK list full, clearing NACK"
" list and requesting keyframe.";
keyframe_request_sender_->RequestKeyFrame();
return;
}
}
// 2、 遍历seq_num_start 到seq_num_end 之间 是否有丢包 有的话 就放到nack_list_中哈
for (uint16_t seq_num = seq_num_start; seq_num != seq_num_end; ++seq_num) {
// Do not send nack for packets that are already recovered by FEC or RTX
// 2.1 是否已经通过FEC或者RTX恢复了 该包 恢复了 就不需要放到nack_list_列表中去哈
if (recovered_list_.find(seq_num) != recovered_list_.end())
continue;
NackInfo nack_info(seq_num, seq_num + WaitNumberOfPackets(0.5),
clock_->TimeInMilliseconds());
RTC_DCHECK(nack_list_.find(seq_num) == nack_list_.end());
nack_list_[seq_num] = nack_info;
}
}
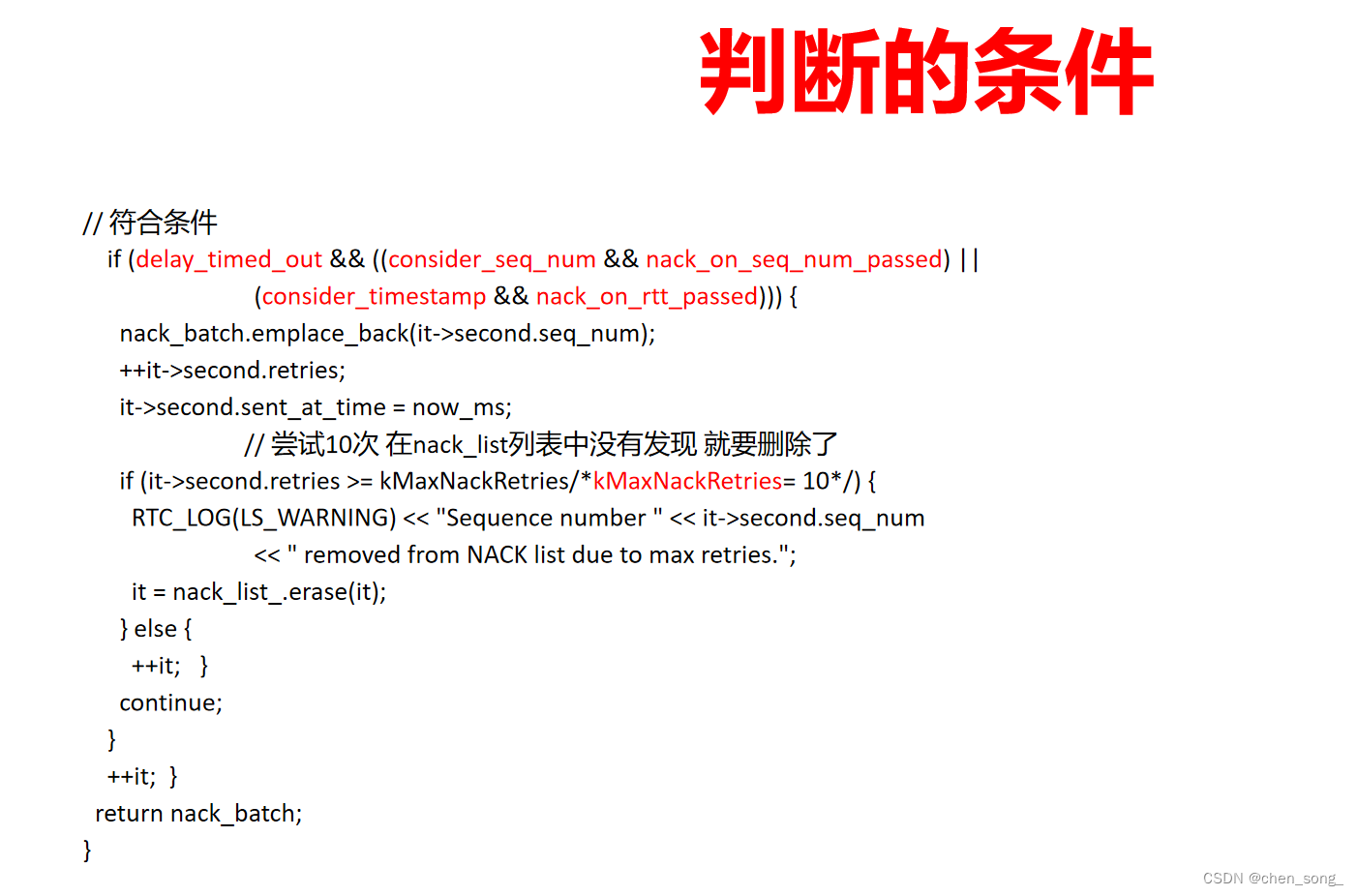
3、 GetNackBatch (真真判定丢包的函数)
// 遍历所有可疑包 如果包符合条件 就插入nack_batch中
std::vector<uint16_t> NackModule::GetNackBatch(NackFilterOptions options) {
// 1. 标识以seq_num为判断条件
bool consider_seq_num = options != kTimeOnly;
// 2. 标识以timestamp为判断条件
bool consider_timestamp = options != kSeqNumOnly;
int64_t now_ms = clock_->TimeInMilliseconds();
std::vector<uint16_t> nack_batch;
auto it = nack_list_.begin();
while (it != nack_list_.end()) {
// 1. send_nack_delay_ms_ 默认为0 , 可修改
bool delay_timed_out = now_ms - it->second.created_at_time >= send_nack_delay_ms_;
// 2. 从一次发送开始到现在, 是否超过了一个RTT的回路的时长 时间
// 需要得到一个RTT防止重复传送的情况
bool nack_on_rtt_passed = now_ms - it->second.sent_at_time >= rtt_ms_;
// 3、 第一次发送和最后处理包之前的
bool nack_on_seq_num_passed = it->second.sent_at_time /*如果是第一次发送*/== -1 &&
AheadOrAt(newest_seq_num_, it->second.send_at_seq_num)/*该包在最后处理的包之前*/;
// 符合条件
if (delay_timed_out && ((consider_seq_num && nack_on_seq_num_passed) ||
(consider_timestamp && nack_on_rtt_passed))) {
nack_batch.emplace_back(it->second.seq_num);
++it->second.retries;
it->second.sent_at_time = now_ms;
// 尝试10次 在nack_list列表中没有发现 就要删除了
if (it->second.retries >= kMaxNackRetries/*kMaxNackRetries= 10*/) {
RTC_LOG(LS_WARNING) << "Sequence number " << it->second.seq_num
<< " removed from NACK list due to max retries.";
it = nack_list_.erase(it);
} else {
++it;
}
continue;
}
++it;
}
return nack_batch;
}
其中要的判断条件
4、周期性执行的函数NackModule::Process
void NackModule::Process() {
if (nack_sender_) {
std::vector<uint16_t> nack_batch;
{
rtc::CritScope lock(&crit_);
nack_batch = GetNackBatch(kTimeOnly);
}
if (!nack_batch.empty())
nack_sender_->SendNack(nack_batch);
}
// Update the next_process_time_ms_ in intervals to achieve
// the targeted frequency over time. Also add multiple intervals
// in case of a skip in time as to not make uneccessary
// calls to Process in order to catch up.
int64_t now_ms = clock_->TimeInMilliseconds();
if (next_process_time_ms_ == -1) {
next_process_time_ms_ = now_ms + kProcessIntervalMs;
} else {
next_process_time_ms_ = next_process_time_ms_ + kProcessIntervalMs +
(now_ms - next_process_time_ms_) /
kProcessIntervalMs * kProcessIntervalMs;
}
}
5、Process函数和OnReceivedPacket函数都有有发送nack函数目的
- 一个是时间查找丢失的包
- 一个seq_num的顺序查找丢失包
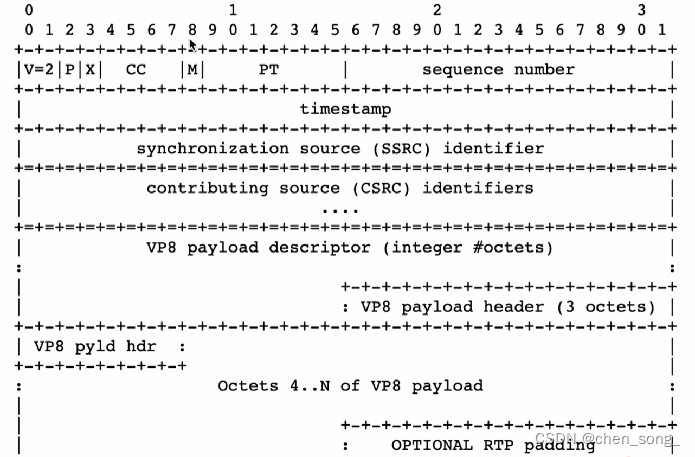
五、WebRTC中VP8关键帧的判断
1、VP8 RTP结构图
2、 VP8 Payload 结构图
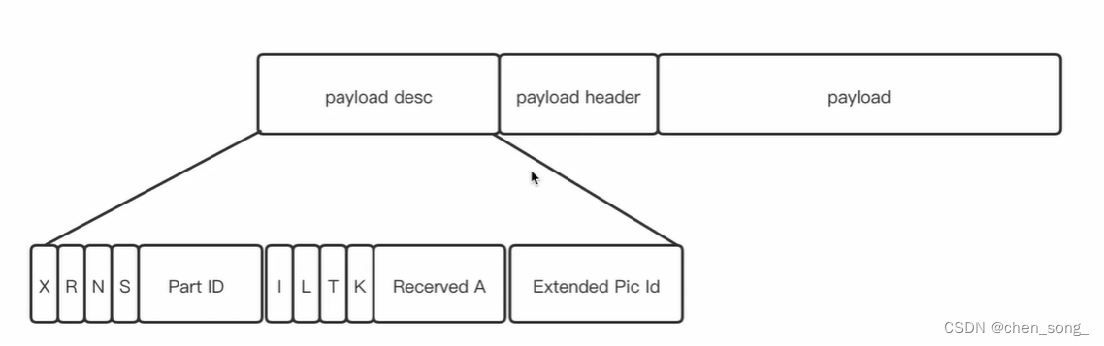
3、 VP8 Payload描述符两种结构
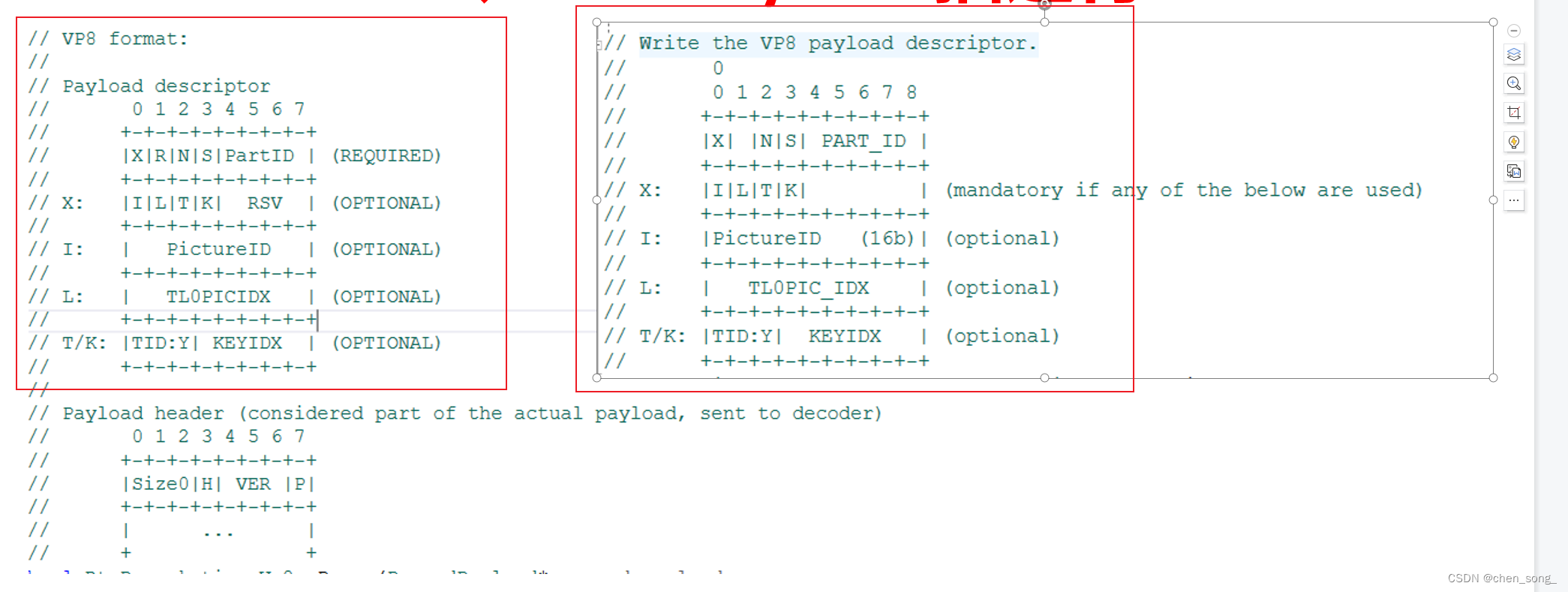
3.1、VP8 Payload 区别和字段含义
1、 两者的区别
pictureID: 第一个7位第二种15位
2、 字段含义
X:代表是否下面一行有扩展 [I|L|T|K|RSV]
R:预留的字段
N: 1:代表是非参考帧,0:是参考帧
S:是否属于视频帧分片 1:视频帧的第一个分片 0:其他分片
R:预留位
PID:表示分片的序号 , 最大不超过8
3.2、 描述符中的扩展字节
1、I,该位置1, 表示存在PictureID,且其紧跟在扩展字节之后 2、L, 该位置1, 表示存在TLOPICIDX,它跟在PictureID之后,且T位必须置1 3、T,该位置1或者(T=0其K=1),TID/Y/KEYIDX字节存在,否则不存在 4、K,置1,TID/Y/KEYIDX字节存在;T=1且K=0,KEYIDX域被忽略;否则TID/Y/KEYIDX字节不存在 5、SRV,保留,必须设置为0
需要注意的点 1、PictureID域由M和PictureID组成。 M=1 :PictureID占15位; M = 0 : 占7位 2、 TID= 0 , TLOPICIDX表示的是时间基础层帧的运行索引 视频的分层 3、TID> 0 : TLOPICIDX表示的是当前图像所依赖的基础层帧 4、TID/Y/KEYIDX域中,TID占两位,Y占1位,KEYIDX占5位 TID:代表时间层,基础层为0,层级越高,值越大 Y: 层同步位,置1,表示当前帧仅依赖基础层帧(TIDO);置0表示当前帧不依赖基础帧 KEYIDX:key帧索引值4、VP8 Payload Header
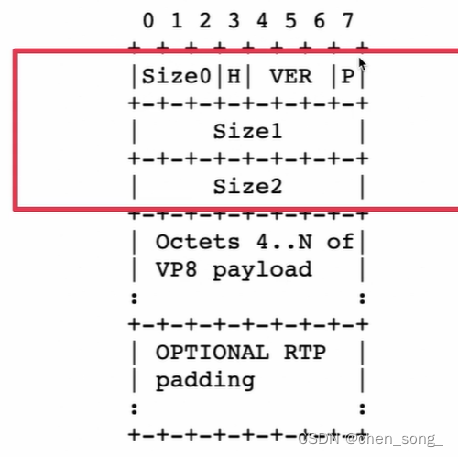
4.1、VP8 Payload header 字段含义
一、 Header 1、对于内部帧,该域占3字节;对于key帧,该域占10字节 2、其中前3个字节的结构是通用的 3、该Header只有在上面的S位置位且PID=0时才存在 二、字段含义 1、P,1位,表示帧类型: 0-key, 1-infterframe 关键帧 2、VER,3位,1-3定义了4种不同的解码复杂度的profile 3、SIze, 19位,第一个分片字节的大小
5、KeyFrame Header 乘下的7个字节 含义
1、 3字节起始码: 固定值: 0x9D,0x01,0x2A 2、接下来的16位:(2bit Horizontal Scale « 14) | Width (14bits) 3、最后16位: (2bits Vertical Scale « 14)| Height (14bits)
总结:
WebRTC源码分析地址:https://github.com/chensongpoixs/cwebrtc